
During my Ph.D. studies at Uppsala University, I acquired and published three texture datasets, I have had requests on hosting these datasets on additional locations other than the university server (address http://cb.uu.se/~gustaf/). Here is an overview: link
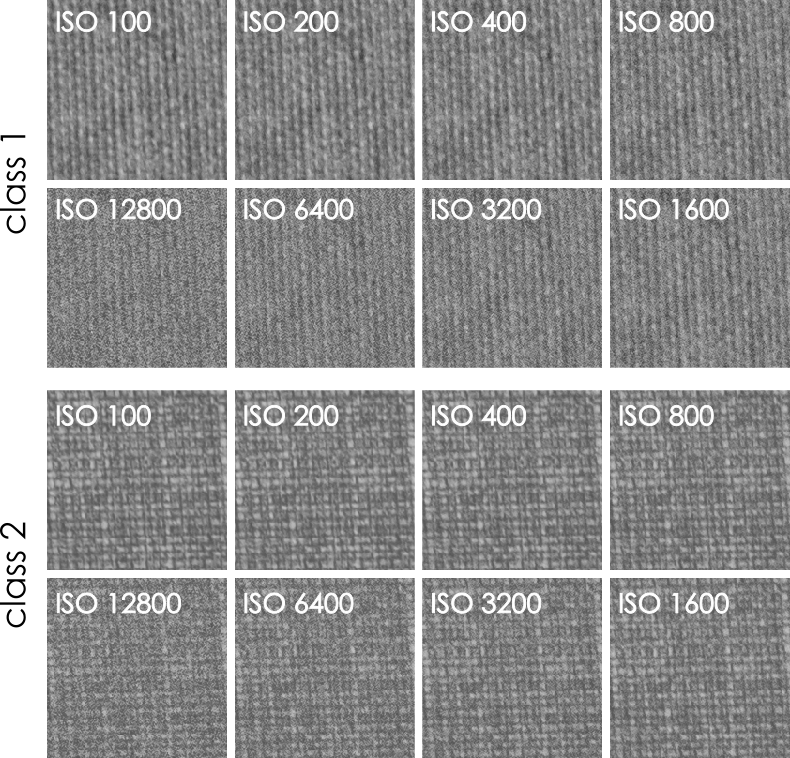
In my PhD thesis (Section 4.4) I used a dataset with two similar textures where I changed the ISO setting on my camera to introduce different levels of noise. The figure below shows examples of each class and ISO level.
| Number of texture classes | 2 |
| Number of noise levels | 8 |
| Number of texture samples per class and noise level | 486 |
| Size of texture sample (w x h [pixels]) | 192 x 192 |
| Total number of texture samples | 7 776 |
| File format | 8 bit PNG |
| Size on disk | ~193 MB |
Download
https://filedn.com/lkCRue0RhPO7ercIrqFRl2Y/datasets/ISO/
How to reference
If you use this dataset in your research or other work, please give a reference to my PhD thesis: http://urn.kb.se/resolve?urn=urn:nbn:se:uu:diva-217328
Kylberg, G. Automatic Virus Identification using TEM : Image Segmentation and Texture Analysis PhD dissertation, Uppsala University, Uppsala 2014. Available from: http://urn.kb.se/resolve?urn=urn:nbn:se:uu:diva-217328
From my thesis
Section 4.4 touches upon the topic of invariant texture features, overfitting and generalization performance in texture recognition.
Using this dataset I show that the applied texture descriptors can differentiate not only between the two texture classes but also between the noise levels. Subsampling the textures to 1/4 of the original scale the descriptors start to only see the two texture classes.
By considering different decision boundaries in the feature space projections in Fig. 4.9 below we can easily find situations where a classifier would generalize badly to new noise levels. For example, consider using a horizontal line as a decision boundary only looking at the ISO 100 data in the top-left plot. That boundary would very badly handle the noisier data,
Another interesting situation that can occure is that a classifier could pick up difference in noise levels between classes rather than differences between the textures. Without careful model validation and/or understanding of the generated feature space it is very difficult to know what characteristic properties the discrimination is actually based on.
